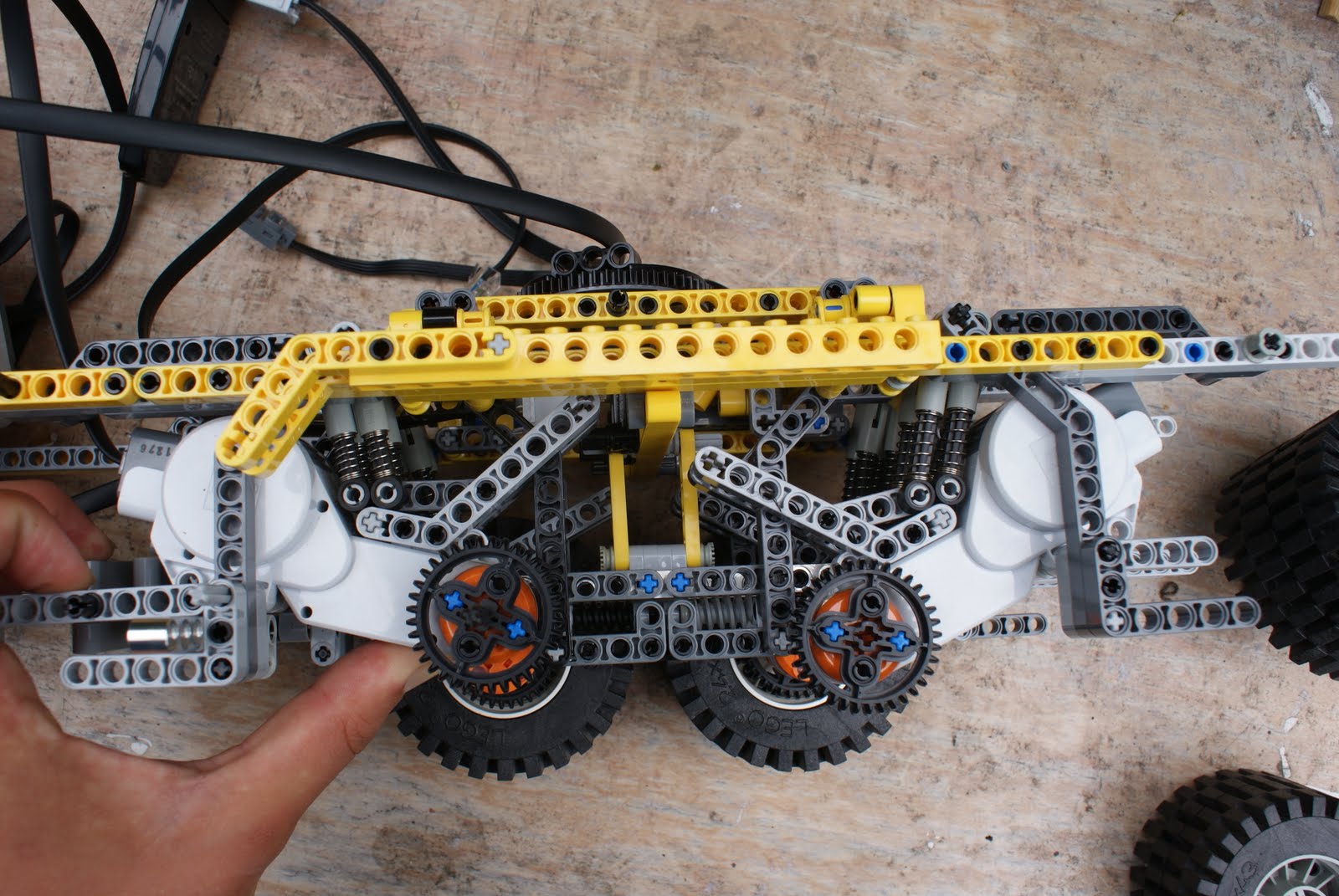
For steering and front suspension i use the system from my
8865-1 Set (Test Car). The frontmodule is build studded because of this. In the A-model of the 8856-1 set every wheel has two schock absorbers. I adapted it to use six for one wheel to compensate for the weight of the motors and batteries.
Steering is driven by a pf-minimotor. I added a
rotation sensor (2977c01) to make a digital differential possible.